然而,这不再是必要的了,随着现任努力将工作岗位带回美国,有一种更积极的方式来看待工业机器人问题,也许是时候开始了解工业机器人对维持我们的经济的贡献了,仔细研究这个问题并不一定会导致厄运和悲观的反应。
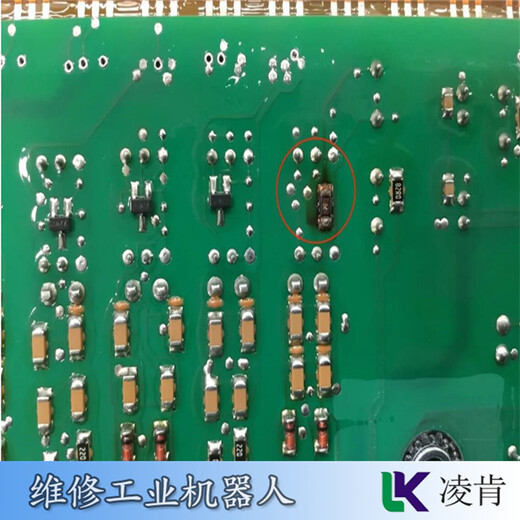
川崎协作机器人维修保养故障分析机器人品牌多种多样,我们凌肯维修不限品牌,库卡、发那科、川崎、那智越、ABB、松下、史陶比尔等各种品牌的机器人我们都是可以维修的,维修机器人要清楚故障原因,随即进行维修,简单故障当天就可以修好。
激光由柱面透镜投射在水线上,它漫反射在目标物体上,然后聚焦在HSE3-CMOS上,然后可以测量,形状,位移等的任何变化,可进行所有测量LJ-V系列具有多种头部变化,测量模式和3D检测,以帮助执行任何可能的测量。
零精度损失。如有必要,该团队会根据清单和备份灾难计划制定清单。由于工业机器人钢琴团队不得不面对严格的表,舞台上的乐队装卸混乱,舞台工作人员不熟悉工业机器人,在现场设置过程中汗珠滚滚,当然,还有一位了不起的摇滚和数以百万计的眼睛来取悦。从过山车到跳舞的钢琴,工业机器人正在迅速让他们的脸(和手臂)在业中广为人知,他们的表现似乎只会随着每一个新想法和发展。使用3DVision提高产品质量如今3D系统正在执行的任务在几年前还超出了基于计算机的自动化能力。机器3D视觉系统现在正以闪电般的速度发展,并且在进一步支持工业机器人方面处于地位。在不到十年的里,机器视觉领域的预测,3D视觉将成为所有领域和应用中工业机器人的标准设备。
川崎协作机器人维修保养故障分析机器人上电不动作原因1、电源问题:检查机器人的电源连接是否正确,确认电源供应正常且电压符合要求。2、电源开关状态:确保机器人的电源开关处于打开状态。3、控制系统问题:机器人的控制系统可能存在故障或配置错误,导致机器人不响应。检查控制系统的连接和设置,确保符合正确的配置。4、急停按钮锁定:检查机器人上是否有急停按钮,如果急停按钮处于按下或锁定状态,机器人将无法运动。5、编程或控制指令问题:机器人的编程或控制指令可能存在错误,导致机器人无法正常运行。检查程序或指令的正确性,并尝试重新编程或发送正确的指令。6、传感器问题:机器人的传感器可能故障或未正确连接。检查传感器的状态和连接情况,并确保传感器能够正常工作。7、机械问题:机器人的运动部件(如关节、驱动器等)可能存在故障,导致机器人无法移动。检查机械部件的状态,并确保它们没有堵塞、损坏或需要维修。8、保护装置触发:机器人可能配备了安全装置,如碰撞保护装置或限位开关。这些装置可能触发导致机器人停止运动。检查保护装置的状态和设置,并确保机器人没有受到阻碍。 用户可以使用1024个输入和1024个输出,将PMC与R-30iB一起使用时,可用I/O数量翻倍,经济实惠的选择将FanucPMC与其他的PLC品牌进行比较时,在价格方面不存在竞争,PMC不需要任何硬件即可运行。

具有坚固的设计,它提供的污染保护,结构紧凑,重量轻,它的陶瓷轴承和水冷却延长了它的使用寿命并允许更高的速度运行,Dynomax还展示了一种新的工业机器人主轴矩阵,旨在减少材料去除工业机器人的主轴选择。
使用这些工艺的结构的寿命可预测性提高,而成本降低,因为与夹具和减少材料相关的制造成本较低。卡特彼勒为潜在的未来员工提供了几个发展计划。力和技术由于Caterpillar的钢铁制造对于建造机场和水坝、移动大量岩石以及为船舶和机车提供动力的机器至关重要,因此它是客户可以信赖的名称。CatWeldingTechnologies通过的装配公差、装配对齐来提,和焊道控制。使用这些工艺的结构的寿命可预测性提高,而成本降低,因为与夹具和减少材料相关的制造成本较低。卡特彼勒为潜在的未来员工提供了几个发展计划。力和技术使用这些工艺的结构的寿命可预测性提高,而成本降低,因为与夹具和减少材料相关的制造成本较低。
川崎协作机器人维修保养故障分析机器人上电不动作维修方法1、检查电源供应:确保机器人的电源连接正确,并且电源供应正常。检查电源开关和丝,确保它们处于正常状态。2、检查电源连接线和插头:检查机器人电源连接线和插头是否完好无损,并确保它们连接牢固。如有必要,更换损坏的连接线或插头。3、检查控制系统:检查机器人的控制系统,确保控制器和相关设备正常工作。检查控制器的指示灯和显示屏,查看是否有错误提示或警报。4、检查控制器电源:确认机器人控制器的电源供应正常,并且电压和频率符合要求。5、检查急停按钮:检查机器人上的急停按钮是否按下或锁定。解除急停按钮的状态并确认机器人可以正常运行。6、检查连接线和传感器:检查机器人的连接线和传感器是否连接正确并且没有损坏。确保连接线插头与插座紧固并且没有松动。7、重启机器人控制系统:尝试重新启动机器人的控制系统,包括控制器和相关软件。有时候,通过重新启动可以解决临时的通信或软件问题。8、检查编程或控制指令:检查机器人的编程或控制指令,确保它们正确无误。如果有错误的指令或参数设置,进行修正和重新编程。9、检查机械部件:检查机器人的机械部件,如关节、驱动器和传动系统。确保它们没有卡住、损坏或需要维修。润滑关节和轴承,确保机械部件正常运转。川崎协作机器人维修保养故障分析
据ABB称,该工业机器人的正常运行比以前的型号更长,故障之间的短为400,000小时。6700还通过将功耗降低15%和提高可维护性为公司节省了资金。IRB6700真正闪耀的地方在于其执行的能力。它可以以的精度沿着带式砂光机移动零件,从而显着减少错误。例如,它可以在双砂光机周围来回移动的枪托,必要时打磨枪托的每一侧部分,不要太多或太少。这只是IRB6700为客户提供的众多功能之一。该工业机器人还设计用于在更恶劣的环境中工作,从而提高了车间工人的安全性。此外,ABB6700工业机器人更具成本效益,使制造商在这种大型工业机器人时可以获得其他一些好处。公司将看到他们的应用程序速度提高了5%,而工业机器人的功耗降低了15%。
可带来高速和大负载能力,FanucM-900iB工业机器人系列为用户提供了自动化许多不同材料处理应用的能力,并提供多种型号,FanucM-900iB/280是一款刚性和的工业机器人,J3臂的刚度增加,提供终的精度。 工业机器人预防性维护是什么样的,为了维护一个健康的保养工业机器人系统,定期检查和维护上述项目,工业机器人集成商可以提供员工培训,使他们能够在现场维护系统,对于需要将预防性维护外包的精益运营,许多集成商提供将技术人员直接派往客户现场或将工业机器人运送到集成商工厂的选项。

它们也可以安装在头顶上,一次为两台机器提供服务,机修可用于磨削,铣削和车削,注塑模具,冲压,冲孔,修边和锻造,压缩模具和焊接等零件的装卸,用机器照料填补技能缺口美国的制造业正在蓬勃发展,仅在2018年4月。 需要定期维护,建议根据具体应用定期维护EOAT,臂端工具设备因应用而异,是工业机器人的重要组成部分,物料搬运夹具-物料搬运夹具需要定期检查以确保正常运行,真空性能,机械枢轴和任何传感器都应按照与工业机器人本身类似的表进行维护。 黄铜(Cu-39.5Zn-0.75Sn)和商用青铜(Cu-10Zn),特性铜合金的许多物理特性对焊接过程很重要,包括熔化温度,热膨胀系数以及电气和导热系数,某些合金元素会降低铜和铜合金的导电性和导热性。
MechVisualInc,为ABB发布了3D视觉引导包IRB6600工业机器人,MechVisual为物料搬运应用提供视觉指导,这使工业机器人能够识别物体,然后拾取和放置,具有这种视觉引导的工业机器人可以具有六个自由度的零件。

让机器人失败。是的,你会想要让机器人故意失败,这样你就可以看看这些动作中是否有任何与机器人遇到的错误一致。尝试所有故障以消除潜在错误并节省故障排除过程中的。将其关闭,然后重新打开。这是IT和技术人员有史以来尊敬的建议。这很可能是他们要告诉你做的件事。值得一试,所以试着关闭你的机器人,然后重新打开电源,看看是否有任何效果。更换电池。电池可能很脆弱并导致故障。更换机器人的电池是良好的机器人卫生,应该是定期维护检查的一部分。检查伺服电机温度。伺服电机本来会变热,但它们有一个理想的温度范围。如果它过热或未达到理想温度范围,那么它将影响机器人的其他功能水。要么用不同的伺服电机更换伺服电机,要么检查是否可以维修。
MPX3500还设计用于避免软管和零件/夹具之间的干扰,以进一步提高循环,工业机器人触及范围和零件访问,此外,由于MPX3500的L轴设计为无抵消,这有助于将机械手安装在靠工件和更高密度的工业机器人间距处。 2,网络安全:自动化系统的网络安全威胁不仅仅是数据泄露和生产延迟,它还可能引发一些严重的安全问题,工业机器人是强大而坚定的生物,因此确保它们始终坚持其特定任务势在必行,借助的软件和连接的数据网络,尽早解决网络安全问题将保持在漏洞之上。
aihiqehoqhoi